// @(#)root/geom:$Name: $:$Id: TGeoChecker.cxx,v 1.28 2003/02/18 15:37:36 brun Exp $
// Author: Andrei Gheata 01/11/01
// CheckGeometry(), CheckOverlaps() by Mihaela Gheata
/*************************************************************************
* Copyright (C) 1995-2000, Rene Brun and Fons Rademakers. *
* All rights reserved. *
* *
* For the licensing terms see $ROOTSYS/LICENSE. *
* For the list of contributors see $ROOTSYS/README/CREDITS. *
*************************************************************************/
////////////////////////////////////////////////////////////////////////////////
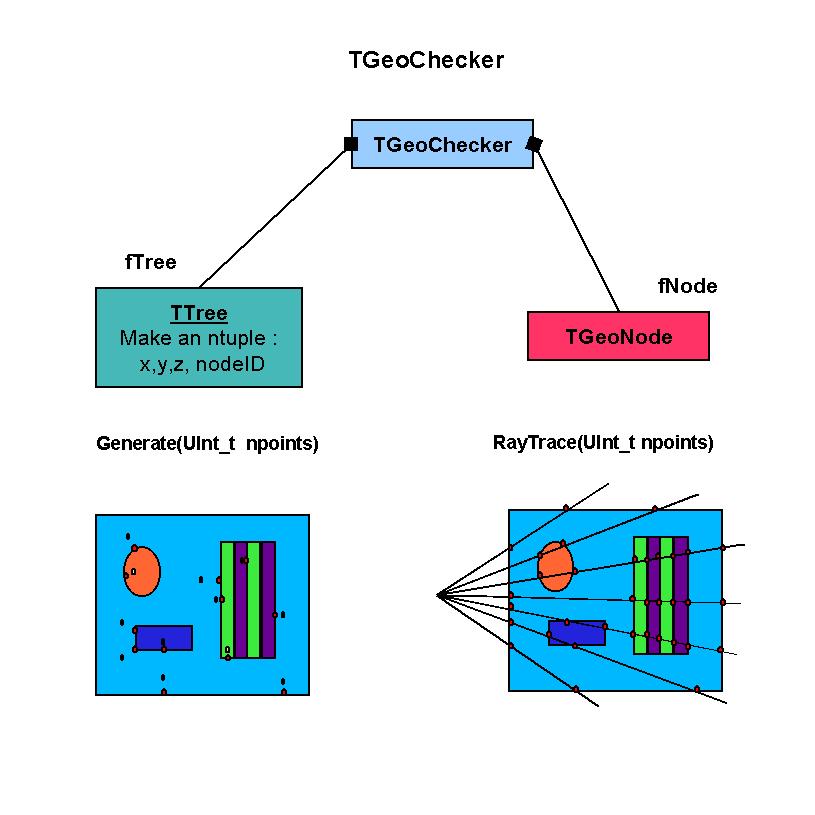
// A simple geometry checker. Points can be randomly generated inside the
// bounding box of a node. For each point the distance to the nearest surface
// and the corresponting point on that surface are computed. These points are
// stored in a tree and can be directly visualized within ROOT
// A second algoritm is shooting multiple rays from a given point to a geometry
// branch and storing the intersection points with surfaces in same tree.
// Rays can be traced backwords in order to find overlaps by comparing direct
// and inverse points.
//
/*
 */
//
#include "TVirtualPad.h"
#include "TNtuple.h"
#include "TH2.h"
#include "TRandom3.h"
#include "TPolyMarker3D.h"
#include "TPolyLine3D.h"
#include "TStopwatch.h"
#include "TGeoBBox.h"
#include "TGeoManager.h"
#include "TGeoOverlap.h"
#include "TGeoPainter.h"
#include "TGeoChecker.h"
// statics and globals
ClassImp(TGeoChecker)
//-----------------------------------------------------------------------------
TGeoChecker::TGeoChecker()
{
// Default constructor
fGeom = 0;
fTreePts = 0;
fVsafe = 0;
}
//-----------------------------------------------------------------------------
TGeoChecker::TGeoChecker(TGeoManager *geom)
{
// Constructor for a given geometry
fGeom = geom;
fTreePts = 0;
fVsafe = 0;
}
//-----------------------------------------------------------------------------
TGeoChecker::TGeoChecker(const char * /*treename*/, const char * /*filename*/)
{
// constructor
fGeom = gGeoManager;
fTreePts = 0;
fVsafe = 0;
}
//-----------------------------------------------------------------------------
TGeoChecker::~TGeoChecker()
{
// Destructor
}
//-----------------------------------------------------------------------------
void TGeoChecker::CheckGeometry(Int_t nrays, Double_t startx, Double_t starty, Double_t startz) const
{
// Shoot nrays with random directions from starting point (startx, starty, startz)
// in the reference frame of this volume. Track each ray until exiting geometry, then
// shoot backwards from exiting point and compare boundary crossing points.
Int_t i, j;
Double_t start[3], end[3];
Double_t dir[3];
Double_t dummy[3];
Double_t eps = 0.;
Double_t *array1 = new Double_t[3*1000];
Double_t *array2 = new Double_t[3*1000];
TObjArray *pma = new TObjArray();
TPolyMarker3D *pm;
pm = new TPolyMarker3D();
pm->SetMarkerColor(2); // error > eps
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.4);
pma->AddAt(pm, 0);
pm = new TPolyMarker3D();
pm->SetMarkerColor(4); // point not found
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.4);
pma->AddAt(pm, 1);
pm = new TPolyMarker3D();
pm->SetMarkerColor(6); // extra point back
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.4);
pma->AddAt(pm, 2);
Int_t nelem1, nelem2;
Int_t dim1=1000, dim2=1000;
if ((startx==0) && (starty==0) && (startz==0)) eps=1E-3;
start[0] = startx+eps;
start[1] = starty+eps;
start[2] = startz+eps;
Int_t n10=nrays/10;
Double_t theta,phi;
Double_t dw, dwmin, dx, dy, dz;
Int_t ist1, ist2, ifound;
for (i=0; i<nrays; i++) {
if (n10) {
if ((i%n10) == 0) printf("%i percentn", Int_t(100*i/nrays));
}
phi = 2*TMath::Pi()*gRandom->Rndm();
theta= TMath::ACos(1.-2.*gRandom->Rndm());
dir[0]=TMath::Sin(theta)*TMath::Cos(phi);
dir[1]=TMath::Sin(theta)*TMath::Sin(phi);
dir[2]=TMath::Cos(theta);
// shoot direct ray
nelem1=nelem2=0;
// printf("DIRECT %in", i);
ShootRay(&start[0], dir[0], dir[1], dir[2], array1, nelem1, dim1);
if (!nelem1) continue;
// for (j=0; j<nelem1; j++) printf("%i : %f %f %fn", j, array1[3*j], array1[3*j+1], array1[3*j+2]);
memcpy(&end[0], &array1[3*(nelem1-1)], 3*sizeof(Double_t));
// shoot ray backwards
// printf("BACK %in", i);
ShootRay(&end[0], -dir[0], -dir[1], -dir[2], array2, nelem2, dim2, &start[0]);
if (!nelem2) {
printf("#### NOTHING BACK ###########################n");
for (j=0; j<nelem1; j++) {
pm = (TPolyMarker3D*)pma->At(0);
pm->SetNextPoint(array1[3*j], array1[3*j+1], array1[3*j+2]);
}
continue;
}
// printf("BACKWARDSn");
Int_t k=nelem2>>1;
for (j=0; j<k; j++) {
memcpy(&dummy[0], &array2[3*j], 3*sizeof(Double_t));
memcpy(&array2[3*j], &array2[3*(nelem2-1-j)], 3*sizeof(Double_t));
memcpy(&array2[3*(nelem2-1-j)], &dummy[0], 3*sizeof(Double_t));
}
// for (j=0; j<nelem2; j++) printf("%i : %f ,%f ,%f n", j, array2[3*j], array2[3*j+1], array2[3*j+2]);
if (nelem1!=nelem2) printf("### DIFFERENT SIZES : nelem1=%i nelem2=%i ##########n", nelem1, nelem2);
ist1 = ist2 = 0;
// check first match
dx = array1[3*ist1]-array2[3*ist2];
dy = array1[3*ist1+1]-array2[3*ist2+1];
dz = array1[3*ist1+2]-array2[3*ist2+2];
dw = dx*dir[0]+dy*dir[1]+dz*dir[2];
fGeom->SetCurrentPoint(&array1[3*ist1]);
fGeom->FindNode();
// printf("%i : %s (%g, %g, %g)n", ist1, fGeom->GetPath(),
// array1[3*ist1], array1[3*ist1+1], array1[3*ist1+2]);
if (TMath::Abs(dw)<1E-4) {
// printf(" matching %i (%g, %g, %g)n", ist2, array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2]);
ist2++;
} else {
printf("### NOT MATCHING %i f:(%f, %f, %f) b:(%f %f %f) DCLOSE=%fn", ist2, array1[3*ist1], array1[3*ist1+1], array1[3*ist1+2], array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2],dw);
pm = (TPolyMarker3D*)pma->At(0);
pm->SetNextPoint(array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2]);
if (dw<0) {
// first boundary missed on way back
} else {
// first boundary different on way back
ist2++;
}
}
while ((ist1<nelem1-1) && (ist2<nelem2)) {
fGeom->SetCurrentPoint(&array1[3*ist1+3]);
fGeom->FindNode();
// printf("%i : %s (%g, %g, %g)n", ist1+1, fGeom->GetPath(),
// array1[3*ist1+3], array1[3*ist1+4], array1[3*ist1+5]);
dx = array1[3*ist1+3]-array1[3*ist1];
dy = array1[3*ist1+4]-array1[3*ist1+1];
dz = array1[3*ist1+5]-array1[3*ist1+2];
// distance to next point
dwmin = dx+dir[0]+dy*dir[1]+dz*dir[2];
while (ist2<nelem2) {
ifound = 0;
dx = array2[3*ist2]-array1[3*ist1];
dy = array2[3*ist2+1]-array1[3*ist1+1];
dz = array2[3*ist2+2]-array1[3*ist1+2];
dw = dx+dir[0]+dy*dir[1]+dz*dir[2];
if (TMath::Abs(dw-dwmin)<1E-4) {
ist1++;
ist2++;
break;
}
if (dw<dwmin) {
// point found on way back. Check if close enough to ist1+1
ifound++;
dw = dwmin-dw;
if (dw<1E-4) {
// point is matching ist1+1
// printf(" matching %i (%g, %g, %g) DCLOSE=%gn", ist2, array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2], dw);
ist2++;
ist1++;
break;
} else {
// extra boundary found on way back
fGeom->SetCurrentPoint(&array2[3*ist2]);
fGeom->FindNode();
pm = (TPolyMarker3D*)pma->At(2);
pm->SetNextPoint(array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2]);
printf("### EXTRA BOUNDARY %i : %s found at DCLOSE=%fn", ist2, fGeom->GetPath(), dw);
ist2++;
continue;
}
} else {
if (!ifound) {
// point ist1+1 not found on way back
fGeom->SetCurrentPoint(&array1[3*ist1+3]);
fGeom->FindNode();
pm = (TPolyMarker3D*)pma->At(1);
pm->SetNextPoint(array2[3*ist1+3], array2[3*ist1+4], array2[3*ist1+5]);
printf("### BOUNDARY MISSED BACK #########################n");
ist1++;
break;
} else {
ist1++;
break;
}
}
}
}
}
pm = (TPolyMarker3D*)pma->At(0);
pm->Draw("SAME");
pm = (TPolyMarker3D*)pma->At(1);
pm->Draw("SAME");
pm = (TPolyMarker3D*)pma->At(2);
pm->Draw("SAME");
if (gPad) {
gPad->Modified();
gPad->Update();
}
delete [] array1;
delete [] array2;
}
//-----------------------------------------------------------------------------
void TGeoChecker::CheckOverlaps(const TGeoVolume *vol, Double_t ovlp, Option_t * /*option*/) const
{
// Check illegal overlaps for volume VOL within a limit OVLP.
if (vol->GetFinder()) return;
Int_t nd = vol->GetNdaughters();
if (!nd) return;
// first, test if daughters extrude their container
TGeoShape *shapem = vol->GetShape();
TGeoNode * node;
TGeoMatrix *matrix;
X3DPoints *buff;
Bool_t extrude, isextrusion, isoverlapping;
TGeoOverlap *nodeovlp = 0;
Bool_t ismany;
Double_t *points;
Double_t local[3];
Double_t point[3];
Double_t safety = 1e30; //TGeoShape::kBig
Int_t id, ip;
for (id=0; id<nd; id++) {
node = vol->GetNode(id);
buff = (X3DPoints*)node->GetVolume()->Make3DBuffer();
if (!buff) {
Error("CheckOverlaps", "could not fill X3D buffer for node %s", node->GetName());
return;
}
matrix = node->GetMatrix();
ismany = node->IsOverlapping();
points = buff->points;
isextrusion=kFALSE;
// loop all points
for (ip=0; ip<buff->numPoints; ip++) {
memcpy(local, &points[3*ip], 3*sizeof(Double_t));
matrix->LocalToMaster(local, point);
extrude = !shapem->Contains(point);
if (extrude) {
safety = shapem->Safety(point, kFALSE);
if (safety<ovlp) extrude=kFALSE;
}
if (extrude) {
if (!isextrusion) {
isextrusion = kTRUE;
char *name = new char[20];
sprintf(name,"%s_x_%i", vol->GetName(),id);
nodeovlp = new TGeoExtrusion(name, (TGeoVolume*)vol,id,safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
fGeom->AddOverlap(nodeovlp);
} else {
if (safety>nodeovlp->GetOverlap()) nodeovlp->SetOverlap(safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
}
}
}
if (points) delete [] points;
delete buff;
}
// now check if the daughters overlap with each other
if (nd<2) return;
TGeoVoxelFinder *vox = vol->GetVoxels();
TGeoNode *node1;
TGeoMatrix *matrix1;
TGeoShape *shape1;
Bool_t ismany1, overlap;
Int_t novlp;
Int_t *ovlps;
Int_t ko, io;
for (id=0; id<nd; id++) {
node = vol->GetNode(id);
ismany = node->IsOverlapping();
if (ismany) continue;
shapem = node->GetVolume()->GetShape();
matrix = node->GetMatrix();
if (vox) {
vox->FindOverlaps(id);
ovlps = node->GetOverlaps(novlp);
if (!ovlps) continue;
} else continue;
for (ko=0; ko<novlp; ko++) {
io = ovlps[ko];
if (io<id) continue;
node1 = vol->GetNode(io);
ismany1 = node1->IsOverlapping();
if (ismany1) continue;
matrix1 = node1->GetMatrix();
buff = (X3DPoints*)node1->GetVolume()->Make3DBuffer();
if (!buff) continue;
points = buff->points;
// loop all points
overlap = kFALSE;
isoverlapping = kFALSE;
for (ip=0; ip<buff->numPoints; ip++) {
memcpy(local, &points[3*ip], 3*sizeof(Double_t));
matrix1->LocalToMaster(local, point);
matrix->MasterToLocal(point, local); // now point in local reference of node
overlap = shapem->Contains(local);
if (overlap) {
safety = shapem->Safety(local, kTRUE);
if (safety<ovlp) overlap=kFALSE;
}
if (overlap) {
if (!isoverlapping) {
isoverlapping = kTRUE;
char *name = new char[20];
sprintf(name,"%s_o_%i_%i", vol->GetName(),id,io);
nodeovlp = new TGeoNodeOverlap(name, (TGeoVolume*)vol,id,io,safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
fGeom->AddOverlap(nodeovlp);
} else {
if (safety>nodeovlp->GetOverlap()) nodeovlp->SetOverlap(safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
}
}
}
if (points) delete [] points;
delete buff;
shape1 = node1->GetVolume()->GetShape();
buff = (X3DPoints*)node->GetVolume()->Make3DBuffer();
if (!buff) continue;
points = buff->points;
// loop all points
for (ip=0; ip<buff->numPoints; ip++) {
memcpy(local, &points[3*ip], 3*sizeof(Double_t));
matrix->LocalToMaster(local, point);
matrix1->MasterToLocal(point, local); // now point in local reference of node
overlap = shape1->Contains(local);
if (overlap) {
safety = shape1->Safety(local, kTRUE);
if (safety<ovlp) overlap=kFALSE;
}
if (overlap) {
if (!isoverlapping) {
isoverlapping = kTRUE;
char *name = new char[20];
sprintf(name,"%s_o_%i_%i", vol->GetName(),id,io);
nodeovlp = new TGeoNodeOverlap(name, (TGeoVolume*)vol,id,io,safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
fGeom->AddOverlap(nodeovlp);
} else {
if (safety>nodeovlp->GetOverlap()) nodeovlp->SetOverlap(safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
}
}
}
if (points) delete [] points;
delete buff;
}
node->SetOverlaps(0,0);
}
}
//-----------------------------------------------------------------------------
void TGeoChecker::PrintOverlaps() const
{
// Print the current list of overlaps held by the manager class.
TIter next(fGeom->GetListOfOverlaps());
TGeoOverlap *ov;
printf("=== Overlaps for %s ===n", fGeom->GetName());
while ((ov=(TGeoOverlap*)next())) ov->PrintInfo();
}
//-----------------------------------------------------------------------------
void TGeoChecker::CheckPoint(Double_t x, Double_t y, Double_t z, Option_t *)
{
//--- Draw point (x,y,z) over the picture of the daughers of the volume containing this point.
// Generates a report regarding the path to the node containing this point and the distance to
// the closest boundary.
Double_t point[3];
Double_t local[3];
point[0] = x;
point[1] = y;
point[2] = z;
TGeoVolume *vol = fGeom->GetTopVolume();
if (fVsafe) {
TGeoNode *old = fVsafe->GetNode("SAFETY_1");
if (old) fVsafe->GetNodes()->RemoveAt(vol->GetNdaughters()-1);
}
// if (vol != fGeom->GetMasterVolume()) fGeom->RestoreMasterVolume();
TGeoNode *node = fGeom->FindNode(point[0], point[1], point[2]);
fGeom->MasterToLocal(point, local);
// get current node
printf("=== Check current point : (%g, %g, %g) ===n", point[0], point[1], point[2]);
printf(" - path : %sn", fGeom->GetPath());
// get corresponding volume
if (node) vol = node->GetVolume();
// compute safety distance (distance to boundary ignored)
Double_t close = fGeom->Safety();
printf("Safety radius : %fn", close);
if (close>1E-4) {
TGeoVolume *sph = fGeom->MakeSphere("SAFETY", vol->GetMedium(), 0, close, 0,180,0,360);
sph->SetLineColor(2);
sph->SetLineStyle(3);
vol->AddNode(sph,1,new TGeoTranslation(local[0], local[1], local[2]));
fVsafe = vol;
}
TPolyMarker3D *pm = new TPolyMarker3D();
pm->SetMarkerColor(2);
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.5);
pm->SetNextPoint(local[0], local[1], local[2]);
if (vol->GetNdaughters()<2) fGeom->SetTopVisible();
else fGeom->SetTopVisible(kFALSE);
fGeom->SetVisLevel(1);
if (!vol->IsVisible()) vol->SetVisibility(kTRUE);
vol->Draw();
pm->Draw("SAME");
gPad->Modified();
gPad->Update();
}
//-----------------------------------------------------------------------------
TH2F *TGeoChecker::LegoPlot(Int_t ntheta, Double_t themin, Double_t themax,
Int_t nphi, Double_t phimin, Double_t phimax,
Double_t /*rmin*/, Double_t /*rmax*/, Option_t *option)
{
// Generate a lego plot fot the top volume, according to option.
TH2F *hist = new TH2F("lego", option, nphi, phimin, phimax, ntheta, themin, themax);
Double_t degrad = TMath::Pi()/180.;
Double_t theta, phi, step, matprop, x;
Double_t start[3];
Double_t dir[3];
TGeoNode *startnode, *endnode;
Int_t i; // loop index for phi
Int_t j; // loop index for theta
Int_t ntot = ntheta * nphi;
Int_t n10 = ntot/10;
Int_t igen = 0, iloop=0;
printf("=== Lego plot sph. => nrays=%in", ntot);
for (i=1; i<=nphi; i++) {
for (j=1; j<=ntheta; j++) {
igen++;
if (n10) {
if ((igen%n10) == 0) printf("%i percentn", Int_t(100*igen/ntot));
}
x = 0;
theta = hist->GetYaxis()->GetBinCenter(j);
phi = hist->GetXaxis()->GetBinCenter(i)+1E-3;
start[0] = start[1] = start[2] = 1E-3;
dir[0]=TMath::Sin(theta*degrad)*TMath::Cos(phi*degrad);
dir[1]=TMath::Sin(theta*degrad)*TMath::Sin(phi*degrad);
dir[2]=TMath::Cos(theta*degrad);
fGeom->InitTrack(&start[0], &dir[0]);
startnode = fGeom->GetCurrentNode();
if (fGeom->IsOutside()) startnode=0;
if (startnode) {
matprop = startnode->GetVolume()->GetMaterial()->GetRadLen();
} else {
matprop = 0.;
}
fGeom->FindNextBoundary();
// fGeom->IsStepEntering();
// find where we end-up
endnode = fGeom->Step();
step = fGeom->GetStep();
while (step<1E10) {
// now see if we can make an other step
iloop=0;
while (!fGeom->IsEntering()) {
iloop++;
fGeom->SetStep(1E-3);
step += 1E-3;
endnode = fGeom->Step();
}
if (iloop>1000) printf("%i stepsn", iloop);
if (matprop>0) {
x += step/matprop;
}
if (endnode==0 && step>1E10) break;
// generate an extra step to cross boundary
startnode = endnode;
if (startnode) {
matprop = startnode->GetVolume()->GetMaterial()->GetRadLen();
} else {
matprop = 0.;
}
fGeom->FindNextBoundary();
endnode = fGeom->Step();
step = fGeom->GetStep();
}
hist->Fill(phi, theta, x);
}
}
return hist;
}
//______________________________________________________________________________
void TGeoChecker::RandomPoints(TGeoVolume *vol, Int_t npoints, Option_t *option)
{
// Draw random points in the bounding box of a volume.
if (!vol) return;
gRandom = new TRandom3();
vol->VisibleDaughters(kTRUE);
vol->Draw();
TString opt = option;
opt.ToLower();
TObjArray *pm = new TObjArray(128);
TPolyMarker3D *marker = 0;
const TGeoShape *shape = vol->GetShape();
TGeoBBox *box = (TGeoBBox *)shape;
Double_t dx = box->GetDX();
Double_t dy = box->GetDY();
Double_t dz = box->GetDZ();
Double_t ox = (box->GetOrigin())[0];
Double_t oy = (box->GetOrigin())[1];
Double_t oz = (box->GetOrigin())[2];
Double_t *xyz = new Double_t[3];
printf("Random box : %f, %f, %fn", dx, dy, dz);
TGeoNode *node = 0;
printf("Start... %i pointsn", npoints);
Int_t i=0;
Int_t igen=0;
Int_t ic = 0;
Int_t n10 = npoints/10;
Double_t ratio=0;
while (igen<npoints) {
xyz[0] = ox-dx+2*dx*gRandom->Rndm();
xyz[1] = oy-dy+2*dy*gRandom->Rndm();
xyz[2] = oz-dz+2*dz*gRandom->Rndm();
fGeom->SetCurrentPoint(xyz);
igen++;
if (n10) {
if ((igen%n10) == 0) printf("%i percentn", Int_t(100*igen/npoints));
}
node = fGeom->FindNode();
if (!node) continue;
if (!node->IsOnScreen()) continue;
// draw only points in overlapping/non-overlapping volumes
if (opt.Contains("many") && !node->IsOverlapping()) continue;
if (opt.Contains("only") && node->IsOverlapping()) continue;
ic = node->GetColour();
if ((ic<0) || (ic>=128)) ic = 0;
marker = (TPolyMarker3D*)pm->At(ic);
if (!marker) {
marker = new TPolyMarker3D();
marker->SetMarkerColor(ic);
marker->SetMarkerStyle(8);
marker->SetMarkerSize(0.4);
pm->AddAt(marker, ic);
}
marker->SetNextPoint(xyz[0], xyz[1], xyz[2]);
i++;
}
printf("Number of visible points : %in", i);
ratio = (Double_t)i/(Double_t)igen;
printf("efficiency : %gn", ratio);
for (Int_t m=0; m<128; m++) {
marker = (TPolyMarker3D*)pm->At(m);
if (marker) marker->Draw("SAME");
}
fGeom->GetTopVolume()->VisibleDaughters(kFALSE);
printf("---Daughters of %s made invisible.n", fGeom->GetTopVolume()->GetName());
printf("---Make them visible with : gGeoManager->GetTopVolume()->VisibleDaughters();n");
delete pm;
delete xyz;
}
//-----------------------------------------------------------------------------
void TGeoChecker::RandomRays(Int_t nrays, Double_t startx, Double_t starty, Double_t startz)
{
// Randomly shoot nrays from point (startx,starty,startz) and plot intersections
// with surfaces for current top node.
TObjArray *pm = new TObjArray(128);
TPolyLine3D *line = 0;
gRandom = new TRandom3();
TGeoVolume *vol=fGeom->GetTopVolume();
vol->VisibleDaughters(kTRUE);
Double_t start[3];
Double_t dir[3];
Int_t istep= 0;
Double_t *point = fGeom->GetCurrentPoint();
vol->Draw();
printf("Start... %i raysn", nrays);
TGeoNode *startnode, *endnode;
Bool_t vis1,vis2;
Int_t i=0;
Int_t ipoint;
Int_t itot=0;
Int_t n10=nrays/10;
Double_t theta,phi, step;
while (itot<nrays) {
itot++;
ipoint = 0;
if (n10) {
if ((itot%n10) == 0) printf("%i percentn", Int_t(100*itot/nrays));
}
start[0] = startx;
start[1] = starty;
start[2] = startz;
phi = 2*TMath::Pi()*gRandom->Rndm();
theta= TMath::ACos(1.-2.*gRandom->Rndm());
dir[0]=TMath::Sin(theta)*TMath::Cos(phi);
dir[1]=TMath::Sin(theta)*TMath::Sin(phi);
dir[2]=TMath::Cos(theta);
startnode = fGeom->InitTrack(start[0],start[1],start[2], dir[0],dir[1],dir[2]);
line = 0;
if (fGeom->IsOutside()) startnode=0;
vis1 = (startnode)?(startnode->IsOnScreen()):kFALSE;
if (vis1) {
line = new TPolyLine3D(2);
line->SetLineColor(startnode->GetVolume()->GetLineColor());
line->SetPoint(ipoint++, startx, starty, startz);
i++;
pm->Add(line);
}
// find where we end-up
fGeom->FindNextBoundary();
step = fGeom->GetStep();
endnode = fGeom->Step();
vis2 = (endnode)?(endnode->IsOnScreen()):kFALSE;
while (step<1E10) {
istep = 0;
while (!fGeom->IsEntering()) {
istep++;
if (istep>1E4) break;
fGeom->SetStep(1E-3);
endnode = fGeom->Step();
step += 1E-3;
}
if (istep>1E4) break;
// if (istep) printf("ADDED : %f (%i steps)n", istep*1E-3, istep);
vis2 = (endnode)?(endnode->IsOnScreen()):kFALSE;
if (ipoint>0) {
// old visible node had an entry point -> finish segment
line->SetPoint(ipoint, point[0], point[1], point[2]);
ipoint = 0;
line = 0;
}
if (vis2) {
// create new segment
line = new TPolyLine3D(2);
line->SetLineColor(endnode->GetVolume()->GetLineColor());
line->SetPoint(ipoint++, point[0], point[1], point[2]);
i++;
pm->Add(line);
}
// now see if we can make an other step
if (endnode==0 && step>1E10) break;
// generate an extra step to cross boundary
startnode = endnode;
fGeom->FindNextBoundary();
step = fGeom->GetStep();
endnode = fGeom->Step();
}
}
// draw all segments
for (Int_t m=0; m<pm->GetEntriesFast(); m++) {
line = (TPolyLine3D*)pm->At(m);
if (line) line->Draw("SAME");
}
printf("number of segments : %in", i);
fGeom->GetTopVolume()->VisibleDaughters(kFALSE);
printf("---Daughters of %s made invisible.n", fGeom->GetTopVolume()->GetName());
printf("---Make them visible with : gGeoManager->GetTopVolume()->VisibleDaughters();n");
delete pm;
}
//-----------------------------------------------------------------------------
TGeoNode *TGeoChecker::SamplePoints(Int_t npoints, Double_t &dist, Double_t epsil,
const char* g3path)
{
// shoot npoints randomly in a box of 1E-5 arround current point.
// return minimum distance to points outside
// make sure that path to current node is updated
// get the response of tgeo
TGeoNode *node = fGeom->FindNode();
TGeoNode *nodegeo = 0;
TGeoNode *nodeg3 = 0;
TGeoNode *solg3 = 0;
if (!node) {dist=-1; return 0;}
gRandom = new TRandom3();
Bool_t hasg3 = kFALSE;
if (strlen(g3path)) hasg3 = kTRUE;
char geopath[200];
sprintf(geopath, "%sn", fGeom->GetPath());
dist = 1E10;
TString common = "";
// cd to common path
Double_t point[3];
Double_t closest[3];
TGeoNode *node1 = 0;
TGeoNode *node_close = 0;
dist = 1E10;
Double_t dist1 = 0;
// initialize size of random box to epsil
Double_t eps[3];
eps[0] = epsil; eps[1]=epsil; eps[2]=epsil;
Double_t *pointg = fGeom->GetCurrentPoint();
if (hasg3) {
TString spath = geopath;
TString name = "";
Int_t index=0;
while (index>=0) {
index = spath.Index("/", index+1);
if (index>0) {
name = spath(0, index);
if (strstr(g3path, name.Data())) {
common = name;
continue;
} else break;
}
}
// if g3 response was given, cd to common path
if (strlen(common.Data())) {
while (strcmp(fGeom->GetPath(), common.Data()) && fGeom->GetLevel()) {
nodegeo = fGeom->GetCurrentNode();
fGeom->CdUp();
}
fGeom->cd(g3path);
solg3 = fGeom->GetCurrentNode();
while (strcmp(fGeom->GetPath(), common.Data()) && fGeom->GetLevel()) {
nodeg3 = fGeom->GetCurrentNode();
fGeom->CdUp();
}
if (!nodegeo) return 0;
if (!nodeg3) return 0;
fGeom->cd(common.Data());
fGeom->MasterToLocal(fGeom->GetCurrentPoint(), &point[0]);
Double_t xyz[3], local[3];
for (Int_t i=0; i<npoints; i++) {
xyz[0] = point[0] - eps[0] + 2*eps[0]*gRandom->Rndm();
xyz[1] = point[1] - eps[1] + 2*eps[1]*gRandom->Rndm();
xyz[2] = point[2] - eps[2] + 2*eps[2]*gRandom->Rndm();
nodeg3->MasterToLocal(&xyz[0], &local[0]);
if (!nodeg3->GetVolume()->Contains(&local[0])) continue;
dist1 = TMath::Sqrt((xyz[0]-point[0])*(xyz[0]-point[0])+
(xyz[1]-point[1])*(xyz[1]-point[1])+(xyz[2]-point[2])*(xyz[2]-point[2]));
if (dist1<dist) {
// save node and closest point
dist = dist1;
node_close = solg3;
// make the random box smaller
eps[0] = TMath::Abs(point[0]-pointg[0]);
eps[1] = TMath::Abs(point[1]-pointg[1]);
eps[2] = TMath::Abs(point[2]-pointg[2]);
}
}
}
if (!node_close) dist = -1;
return node_close;
}
// gRandom = new TRandom3();
// save current point
memcpy(&point[0], pointg, 3*sizeof(Double_t));
for (Int_t i=0; i<npoints; i++) {
// generate a random point in MARS
pointg[0] = point[0] - eps[0] + 2*eps[0]*gRandom->Rndm();
pointg[1] = point[1] - eps[1] + 2*eps[1]*gRandom->Rndm();
pointg[2] = point[2] - eps[2] + 2*eps[2]*gRandom->Rndm();
// check if new node is different from the old one
if (node1!=node) {
dist1 = TMath::Sqrt((point[0]-pointg[0])*(point[0]-pointg[0])+
(point[1]-pointg[1])*(point[1]-pointg[1])+(point[2]-pointg[2])*(point[2]-pointg[2]));
if (dist1<dist) {
dist = dist1;
node_close = node1;
memcpy(&closest[0], pointg, 3*sizeof(Double_t));
// make the random box smaller
eps[0] = TMath::Abs(point[0]-pointg[0]);
eps[1] = TMath::Abs(point[1]-pointg[1]);
eps[2] = TMath::Abs(point[2]-pointg[2]);
}
}
}
// restore the original point and path
memcpy(pointg, &point[0], 3*sizeof(Double_t));
fGeom->FindNode(); // really needed ?
if (!node_close) dist=-1;
return node_close;
}
//-----------------------------------------------------------------------------
void TGeoChecker::ShootRay(Double_t *start, Double_t dirx, Double_t diry, Double_t dirz, Double_t *array, Int_t &nelem, Int_t &dim, Double_t *endpoint) const
{
// Shoot one ray from start point with direction (dirx,diry,dirz). Fills input array
// with points just after boundary crossings.
// Int_t array_dimension = 3*dim;
nelem = 0;
Int_t istep = 0;
if (!dim) {
printf("empty input arrayn");
return;
}
// fGeom->CdTop();
Double_t *point = fGeom->GetCurrentPoint();
TGeoNode *endnode;
Bool_t is_entering;
Double_t step, forward;
Double_t dir[3];
dir[0] = dirx;
dir[1] = diry;
dir[2] = dirz;
fGeom->InitTrack(start, &dir[0]);
fGeom->GetCurrentNode();
// printf("Start : (%f,%f,%f)n", point[0], point[1], point[2]);
fGeom->FindNextBoundary();
step = fGeom->GetStep();
// printf("---next : at step=%fn", step);
if (step>1E10) return;
endnode = fGeom->Step();
is_entering = fGeom->IsEntering();
while (step<1E10) {
if (endpoint) {
forward = dirx*(endpoint[0]-point[0])+diry*(endpoint[1]-point[1])+dirz*(endpoint[2]-point[2]);
if (forward<1E-3) {
// printf("exit : Passed start point. nelem=%in", nelem);
return;
}
}
if (is_entering) {
if (nelem>=dim) {
Double_t *temparray = new Double_t[3*(dim+20)];
memcpy(temparray, array, 3*dim*sizeof(Double_t));
delete [] array;
array = temparray;
dim += 20;
}
memcpy(&array[3*nelem], point, 3*sizeof(Double_t));
// printf("%i (%f, %f, %f) step=%fn", nelem, point[0], point[1], point[2], step);
nelem++;
} else {
if (endnode==0 && step>1E10) {
// printf("exit : NULL endnode. nelem=%in", nelem);
return;
}
if (!fGeom->IsEntering()) {
// if (startnode) printf("stepping %f from (%f, %f, %f) inside %s...n", step,point[0], point[1], point[2], startnode->GetName());
// else printf("stepping %f from (%f, %f, %f) OUTSIDE...n", step,point[0], point[1], point[2]);
istep = 0;
}
while (!fGeom->IsEntering()) {
istep++;
if (istep>1E3) {
// Error("ShootRay", "more than 1000 steps. Step was %f", step);
nelem = 0;
return;
}
fGeom->SetStep(1E-5);
endnode = fGeom->Step();
}
if (istep>0) printf("%i stepsn", istep);
if (nelem>=dim) {
Double_t *temparray = new Double_t[3*(dim+20)];
memcpy(temparray, array, 3*dim*sizeof(Double_t));
delete [] array;
array = temparray;
dim += 20;
}
memcpy(&array[3*nelem], point, 3*sizeof(Double_t));
// if (endnode) printf("%i (%f, %f, %f) step=%fn", nelem, point[0], point[1], point[2], step);
nelem++;
is_entering = kTRUE;
}
fGeom->FindNextBoundary();
step = fGeom->GetStep();
// printf("---next at step=%fn", step);
endnode = fGeom->Step();
is_entering = fGeom->IsEntering();
}
// printf("exit : INFINITE step. nelem=%in", nelem);
}
//-----------------------------------------------------------------------------
void TGeoChecker::Test(Int_t npoints, Option_t *option)
{
// Check time of finding "Where am I" for n points.
gRandom= new TRandom3();
Bool_t recheck = !strcmp(option, "RECHECK");
if (recheck) printf("RECHECKn");
const TGeoShape *shape = fGeom->GetTopVolume()->GetShape();
Double_t dx = ((TGeoBBox*)shape)->GetDX();
Double_t dy = ((TGeoBBox*)shape)->GetDY();
Double_t dz = ((TGeoBBox*)shape)->GetDZ();
Double_t ox = (((TGeoBBox*)shape)->GetOrigin())[0];
Double_t oy = (((TGeoBBox*)shape)->GetOrigin())[1];
Double_t oz = (((TGeoBBox*)shape)->GetOrigin())[2];
Double_t *xyz = new Double_t[3*npoints];
TStopwatch *timer = new TStopwatch();
printf("Random box : %f, %f, %fn", dx, dy, dz);
timer->Start(kFALSE);
Int_t i;
for (i=0; i<npoints; i++) {
xyz[3*i] = ox-dx+2*dx*gRandom->Rndm();
xyz[3*i+1] = oy-dy+2*dy*gRandom->Rndm();
xyz[3*i+2] = oz-dz+2*dz*gRandom->Rndm();
}
timer->Stop();
printf("Generation time :n");
timer->Print();
timer->Reset();
TGeoNode *node, *node1;
printf("Start... %i pointsn", npoints);
timer->Start(kFALSE);
for (i=0; i<npoints; i++) {
fGeom->SetCurrentPoint(xyz+3*i);
if (recheck) fGeom->CdTop();
node = fGeom->FindNode();
if (recheck) {
node1 = fGeom->FindNode();
if (node1 != node) {
printf("Difference for x=%g y=%g z=%gn", xyz[3*i], xyz[3*i+1], xyz[3*i+2]);
printf(" from top : %sn", node->GetName());
printf(" redo : %sn", fGeom->GetPath());
}
}
}
timer->Stop();
timer->Print();
delete xyz;
delete timer;
}
//-----------------------------------------------------------------------------
void TGeoChecker::TestOverlaps(const char* path)
{
//--- Geometry overlap checker based on sampling.
if (fGeom->GetTopVolume()!=fGeom->GetMasterVolume()) fGeom->RestoreMasterVolume();
printf("Checking overlaps for path :n");
if (!fGeom->cd(path)) return;
TGeoNode *checked = fGeom->GetCurrentNode();
checked->InspectNode();
// shoot 1E4 points in the shape of the current volume
gRandom= new TRandom3();
Int_t npoints = 1000000;
Double_t big = 1E6;
Double_t xmin = big;
Double_t xmax = -big;
Double_t ymin = big;
Double_t ymax = -big;
Double_t zmin = big;
Double_t zmax = -big;
TObjArray *pm = new TObjArray(128);
TPolyMarker3D *marker = 0;
TPolyMarker3D *markthis = new TPolyMarker3D();
markthis->SetMarkerColor(5);
TNtuple *ntpl = new TNtuple("ntpl","random points","x:y:z");
TGeoShape *shape = fGeom->GetCurrentNode()->GetVolume()->GetShape();
Double_t *point = new Double_t[3];
Double_t dx = ((TGeoBBox*)shape)->GetDX();
Double_t dy = ((TGeoBBox*)shape)->GetDY();
Double_t dz = ((TGeoBBox*)shape)->GetDZ();
Double_t ox = (((TGeoBBox*)shape)->GetOrigin())[0];
Double_t oy = (((TGeoBBox*)shape)->GetOrigin())[1];
Double_t oz = (((TGeoBBox*)shape)->GetOrigin())[2];
Double_t *xyz = new Double_t[3*npoints];
Int_t i=0;
printf("Generating %i points inside %sn", npoints, fGeom->GetPath());
while (i<npoints) {
point[0] = ox-dx+2*dx*gRandom->Rndm();
point[1] = oy-dy+2*dy*gRandom->Rndm();
point[2] = oz-dz+2*dz*gRandom->Rndm();
if (!shape->Contains(point)) continue;
// convert each point to MARS
// printf("local %9.3f %9.3f %9.3fn", point[0], point[1], point[2]);
fGeom->LocalToMaster(point, &xyz[3*i]);
// printf("master %9.3f %9.3f %9.3fn", xyz[3*i], xyz[3*i+1], xyz[3*i+2]);
xmin = TMath::Min(xmin, xyz[3*i]);
xmax = TMath::Max(xmax, xyz[3*i]);
ymin = TMath::Min(ymin, xyz[3*i+1]);
ymax = TMath::Max(ymax, xyz[3*i+1]);
zmin = TMath::Min(zmin, xyz[3*i+2]);
zmax = TMath::Max(zmax, xyz[3*i+2]);
i++;
}
delete point;
ntpl->Fill(xmin,ymin,zmin);
ntpl->Fill(xmax,ymin,zmin);
ntpl->Fill(xmin,ymax,zmin);
ntpl->Fill(xmax,ymax,zmin);
ntpl->Fill(xmin,ymin,zmax);
ntpl->Fill(xmax,ymin,zmax);
ntpl->Fill(xmin,ymax,zmax);
ntpl->Fill(xmax,ymax,zmax);
ntpl->Draw("z:y:x");
// shoot the poins in the geometry
TGeoNode *node;
TString cpath;
Int_t ic=0;
TObjArray *overlaps = new TObjArray();
printf("using FindNode...n");
for (Int_t j=0; j<npoints; j++) {
// always start from top level (testing only)
fGeom->CdTop();
fGeom->SetCurrentPoint(&xyz[3*j]);
node = fGeom->FindNode();
cpath = fGeom->GetPath();
if (cpath.Contains(path)) {
markthis->SetNextPoint(xyz[3*j], xyz[3*j+1], xyz[3*j+2]);
continue;
}
// current point is found in an overlapping node
if (!node) ic=128;
else ic = node->GetVolume()->GetLineColor();
if (ic >= 128) ic = 0;
marker = (TPolyMarker3D*)pm->At(ic);
if (!marker) {
marker = new TPolyMarker3D();
marker->SetMarkerColor(ic);
pm->AddAt(marker, ic);
}
// draw the overlapping point
marker->SetNextPoint(xyz[3*j], xyz[3*j+1], xyz[3*j+2]);
if (node) {
if (overlaps->IndexOf(node) < 0) overlaps->Add(node);
}
}
// draw all overlapping points
for (Int_t m=0; m<128; m++) {
marker = (TPolyMarker3D*)pm->At(m);
// if (marker) marker->Draw("SAME");
}
markthis->Draw("SAME");
if (gPad) gPad->Update();
// display overlaps
if (overlaps->GetEntriesFast()) {
printf("list of overlapping nodes :n");
for (i=0; i<overlaps->GetEntriesFast(); i++) {
node = (TGeoNode*)overlaps->At(i);
if (node->IsOverlapping()) printf("%s MANYn", node->GetName());
else printf("%s ONLYn", node->GetName());
}
} else printf("No overlapsn");
delete ntpl;
delete pm;
delete xyz;
delete overlaps;
}
//-----------------------------------------------------------------------------
Double_t TGeoChecker::Weight(Double_t precision, Option_t *option)
{
// Estimate weight of top level volume with a precision SIGMA(W)/W
// better than PRECISION. Option can be "v" - verbose (default).
TList *matlist = fGeom->GetListOfMaterials();
Int_t nmat = matlist->GetSize();
if (!nmat) return 0;
Int_t *nin = new Int_t[nmat];
memset(nin, 0, nmat*sizeof(Int_t));
gRandom = new TRandom3();
TString opt = option;
opt.ToLower();
Bool_t isverbose = opt.Contains("v");
TGeoBBox *box = (TGeoBBox *)fGeom->GetTopVolume()->GetShape();
Double_t dx = box->GetDX();
Double_t dy = box->GetDY();
Double_t dz = box->GetDZ();
Double_t ox = (box->GetOrigin())[0];
Double_t oy = (box->GetOrigin())[1];
Double_t oz = (box->GetOrigin())[2];
Double_t x,y,z;
TGeoNode *node;
TGeoMaterial *mat;
Double_t vbox = 0.000008*dx*dy*dz; // m3
Bool_t end = kFALSE;
Double_t weight=0, sigma, eps, dens;
Double_t eps0=1.;
Int_t indmat;
Int_t igen=0;
Int_t iin = 0;
while (!end) {
x = ox-dx+2*dx*gRandom->Rndm();
y = oy-dy+2*dy*gRandom->Rndm();
z = oz-dz+2*dz*gRandom->Rndm();
node = fGeom->FindNode(x,y,z);
igen++;
if (!node) continue;
mat = node->GetVolume()->GetMedium()->GetMaterial();
indmat = mat->GetIndex();
if (indmat<0) continue;
nin[indmat]++;
iin++;
if ((iin%100000)==0 || igen>1E8) {
weight = 0;
sigma = 0;
for (indmat=0; indmat<nmat; indmat++) {
mat = (TGeoMaterial*)matlist->At(indmat);
dens = mat->GetDensity(); // [g/cm3]
if (dens<1E-2) dens=0;
dens *= 1000.; // [kg/m3]
weight += dens*Double_t(nin[indmat]);
sigma += dens*dens*nin[indmat];
}
sigma = TMath::Sqrt(sigma);
eps = sigma/weight;
weight *= vbox/Double_t(igen);
sigma *= vbox/Double_t(igen);
if (eps<precision || igen>1E8) {
if (isverbose) {
printf("=== Weight of %s : %g +/- %g [kg]n",
fGeom->GetTopVolume()->GetName(), weight, sigma);
}
end = kTRUE;
} else {
if (isverbose && eps<0.5*eps0) {
printf("%8dK: %14.7g kg %g %%n",
igen/1000, weight, eps*100);
eps0 = eps;
}
}
}
}
delete [] nin;
return weight;
}
//-----------------------------------------------------------------------------
Double_t TGeoChecker::CheckVoxels(TGeoVolume *vol, TGeoVoxelFinder *voxels, Double_t *xyz, Int_t npoints)
{
// count voxel timing
TStopwatch timer;
Double_t time;
TGeoShape *shape = vol->GetShape();
TGeoNode *node;
TGeoMatrix *matrix;
Double_t *point;
Double_t local[3];
Int_t *checklist;
Int_t ncheck;
timer.Start();
for (Int_t i=0; i<npoints; i++) {
point = xyz + 3*i;
if (!shape->Contains(point)) continue;
checklist = voxels->GetCheckList(point, ncheck);
if (!checklist) continue;
if (!ncheck) continue;
for (Int_t id=0; id<ncheck; id++) {
node = vol->GetNode(checklist[id]);
matrix = node->GetMatrix();
matrix->MasterToLocal(point, &local[0]);
if (node->GetVolume()->GetShape()->Contains(&local[0])) break;
}
}
time = timer.CpuTime();
return time;
}
//-----------------------------------------------------------------------------
Bool_t TGeoChecker::TestVoxels(TGeoVolume *vol, Int_t npoints)
{
// Returns optimal voxelization type for volume vol.
// kFALSE - cartesian
// kTRUE - cylindrical
TGeoVoxelFinder *voxels = vol->GetVoxels();
if (!voxels) return kFALSE;
gRandom= new TRandom3();
const TGeoShape *shape = vol->GetShape();
Double_t dx = ((TGeoBBox*)shape)->GetDX();
Double_t dy = ((TGeoBBox*)shape)->GetDY();
Double_t dz = ((TGeoBBox*)shape)->GetDZ();
Double_t ox = (((TGeoBBox*)shape)->GetOrigin())[0];
Double_t oy = (((TGeoBBox*)shape)->GetOrigin())[1];
Double_t oz = (((TGeoBBox*)shape)->GetOrigin())[2];
Double_t *xyz = new Double_t[3*npoints];
Int_t i;
// generate npoints
for (i=0; i<npoints; i++) {
xyz[3*i] = ox-dx+2*dx*gRandom->Rndm();
xyz[3*i+1] = oy-dy+2*dy*gRandom->Rndm();
xyz[3*i+2] = oz-dz+2*dz*gRandom->Rndm();
}
Bool_t voxtype = vol->IsCylVoxels();
Double_t time1, time2;
TGeoVoxelFinder *vox1, *vox2;
// build both voxelization types
if (voxtype) {
printf(" default voxelization was cylindrical.n");
vox2 = voxels;
vox1 = new TGeoVoxelFinder(vol);
vox1->Voxelize("");
if (!vol->GetVoxels()) {
vol->SetVoxelFinder(voxels);
delete xyz;
return voxtype;
}
} else {
printf(" default voxelization was cartesian.n");
vox1 = voxels;
vox2 = new TGeoCylVoxels(vol);
vox2->Voxelize("");
if (!vol->GetVoxels()) {
vol->SetVoxelFinder(voxels);
delete xyz;
return voxtype;
}
}
// count both voxelization timings
time1 = CheckVoxels(vol, vox1, xyz, npoints);
time2 = CheckVoxels(vol, vox2, xyz, npoints);
printf(" --- time for XYZ : %gn", time1);
printf(" --- time for cyl : %gn", time2);
if (time1<time2) {
printf(" best : XYZn");
delete vox2;
vol->SetVoxelFinder(vox1);
vol->SetCylVoxels(kFALSE);
delete xyz;
return kFALSE;
}
printf(" best : cyln");
delete vox1;
vol->SetVoxelFinder(vox2);
vol->SetCylVoxels(kTRUE);
delete xyz;
return kTRUE;
}
//-----------------------------------------------------------------------------
void TGeoChecker::CreateTree(const char * /*treename*/, const char * /*filename*/)
{
// These points are stored in a tree and can be directly visualized within ROOT.
//
/*
*/
//
#include "TVirtualPad.h"
#include "TNtuple.h"
#include "TH2.h"
#include "TRandom3.h"
#include "TPolyMarker3D.h"
#include "TPolyLine3D.h"
#include "TStopwatch.h"
#include "TGeoBBox.h"
#include "TGeoManager.h"
#include "TGeoOverlap.h"
#include "TGeoPainter.h"
#include "TGeoChecker.h"
// statics and globals
ClassImp(TGeoChecker)
//-----------------------------------------------------------------------------
TGeoChecker::TGeoChecker()
{
// Default constructor
fGeom = 0;
fTreePts = 0;
fVsafe = 0;
}
//-----------------------------------------------------------------------------
TGeoChecker::TGeoChecker(TGeoManager *geom)
{
// Constructor for a given geometry
fGeom = geom;
fTreePts = 0;
fVsafe = 0;
}
//-----------------------------------------------------------------------------
TGeoChecker::TGeoChecker(const char * /*treename*/, const char * /*filename*/)
{
// constructor
fGeom = gGeoManager;
fTreePts = 0;
fVsafe = 0;
}
//-----------------------------------------------------------------------------
TGeoChecker::~TGeoChecker()
{
// Destructor
}
//-----------------------------------------------------------------------------
void TGeoChecker::CheckGeometry(Int_t nrays, Double_t startx, Double_t starty, Double_t startz) const
{
// Shoot nrays with random directions from starting point (startx, starty, startz)
// in the reference frame of this volume. Track each ray until exiting geometry, then
// shoot backwards from exiting point and compare boundary crossing points.
Int_t i, j;
Double_t start[3], end[3];
Double_t dir[3];
Double_t dummy[3];
Double_t eps = 0.;
Double_t *array1 = new Double_t[3*1000];
Double_t *array2 = new Double_t[3*1000];
TObjArray *pma = new TObjArray();
TPolyMarker3D *pm;
pm = new TPolyMarker3D();
pm->SetMarkerColor(2); // error > eps
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.4);
pma->AddAt(pm, 0);
pm = new TPolyMarker3D();
pm->SetMarkerColor(4); // point not found
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.4);
pma->AddAt(pm, 1);
pm = new TPolyMarker3D();
pm->SetMarkerColor(6); // extra point back
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.4);
pma->AddAt(pm, 2);
Int_t nelem1, nelem2;
Int_t dim1=1000, dim2=1000;
if ((startx==0) && (starty==0) && (startz==0)) eps=1E-3;
start[0] = startx+eps;
start[1] = starty+eps;
start[2] = startz+eps;
Int_t n10=nrays/10;
Double_t theta,phi;
Double_t dw, dwmin, dx, dy, dz;
Int_t ist1, ist2, ifound;
for (i=0; i<nrays; i++) {
if (n10) {
if ((i%n10) == 0) printf("%i percentn", Int_t(100*i/nrays));
}
phi = 2*TMath::Pi()*gRandom->Rndm();
theta= TMath::ACos(1.-2.*gRandom->Rndm());
dir[0]=TMath::Sin(theta)*TMath::Cos(phi);
dir[1]=TMath::Sin(theta)*TMath::Sin(phi);
dir[2]=TMath::Cos(theta);
// shoot direct ray
nelem1=nelem2=0;
// printf("DIRECT %in", i);
ShootRay(&start[0], dir[0], dir[1], dir[2], array1, nelem1, dim1);
if (!nelem1) continue;
// for (j=0; j<nelem1; j++) printf("%i : %f %f %fn", j, array1[3*j], array1[3*j+1], array1[3*j+2]);
memcpy(&end[0], &array1[3*(nelem1-1)], 3*sizeof(Double_t));
// shoot ray backwards
// printf("BACK %in", i);
ShootRay(&end[0], -dir[0], -dir[1], -dir[2], array2, nelem2, dim2, &start[0]);
if (!nelem2) {
printf("#### NOTHING BACK ###########################n");
for (j=0; j<nelem1; j++) {
pm = (TPolyMarker3D*)pma->At(0);
pm->SetNextPoint(array1[3*j], array1[3*j+1], array1[3*j+2]);
}
continue;
}
// printf("BACKWARDSn");
Int_t k=nelem2>>1;
for (j=0; j<k; j++) {
memcpy(&dummy[0], &array2[3*j], 3*sizeof(Double_t));
memcpy(&array2[3*j], &array2[3*(nelem2-1-j)], 3*sizeof(Double_t));
memcpy(&array2[3*(nelem2-1-j)], &dummy[0], 3*sizeof(Double_t));
}
// for (j=0; j<nelem2; j++) printf("%i : %f ,%f ,%f n", j, array2[3*j], array2[3*j+1], array2[3*j+2]);
if (nelem1!=nelem2) printf("### DIFFERENT SIZES : nelem1=%i nelem2=%i ##########n", nelem1, nelem2);
ist1 = ist2 = 0;
// check first match
dx = array1[3*ist1]-array2[3*ist2];
dy = array1[3*ist1+1]-array2[3*ist2+1];
dz = array1[3*ist1+2]-array2[3*ist2+2];
dw = dx*dir[0]+dy*dir[1]+dz*dir[2];
fGeom->SetCurrentPoint(&array1[3*ist1]);
fGeom->FindNode();
// printf("%i : %s (%g, %g, %g)n", ist1, fGeom->GetPath(),
// array1[3*ist1], array1[3*ist1+1], array1[3*ist1+2]);
if (TMath::Abs(dw)<1E-4) {
// printf(" matching %i (%g, %g, %g)n", ist2, array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2]);
ist2++;
} else {
printf("### NOT MATCHING %i f:(%f, %f, %f) b:(%f %f %f) DCLOSE=%fn", ist2, array1[3*ist1], array1[3*ist1+1], array1[3*ist1+2], array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2],dw);
pm = (TPolyMarker3D*)pma->At(0);
pm->SetNextPoint(array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2]);
if (dw<0) {
// first boundary missed on way back
} else {
// first boundary different on way back
ist2++;
}
}
while ((ist1<nelem1-1) && (ist2<nelem2)) {
fGeom->SetCurrentPoint(&array1[3*ist1+3]);
fGeom->FindNode();
// printf("%i : %s (%g, %g, %g)n", ist1+1, fGeom->GetPath(),
// array1[3*ist1+3], array1[3*ist1+4], array1[3*ist1+5]);
dx = array1[3*ist1+3]-array1[3*ist1];
dy = array1[3*ist1+4]-array1[3*ist1+1];
dz = array1[3*ist1+5]-array1[3*ist1+2];
// distance to next point
dwmin = dx+dir[0]+dy*dir[1]+dz*dir[2];
while (ist2<nelem2) {
ifound = 0;
dx = array2[3*ist2]-array1[3*ist1];
dy = array2[3*ist2+1]-array1[3*ist1+1];
dz = array2[3*ist2+2]-array1[3*ist1+2];
dw = dx+dir[0]+dy*dir[1]+dz*dir[2];
if (TMath::Abs(dw-dwmin)<1E-4) {
ist1++;
ist2++;
break;
}
if (dw<dwmin) {
// point found on way back. Check if close enough to ist1+1
ifound++;
dw = dwmin-dw;
if (dw<1E-4) {
// point is matching ist1+1
// printf(" matching %i (%g, %g, %g) DCLOSE=%gn", ist2, array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2], dw);
ist2++;
ist1++;
break;
} else {
// extra boundary found on way back
fGeom->SetCurrentPoint(&array2[3*ist2]);
fGeom->FindNode();
pm = (TPolyMarker3D*)pma->At(2);
pm->SetNextPoint(array2[3*ist2], array2[3*ist2+1], array2[3*ist2+2]);
printf("### EXTRA BOUNDARY %i : %s found at DCLOSE=%fn", ist2, fGeom->GetPath(), dw);
ist2++;
continue;
}
} else {
if (!ifound) {
// point ist1+1 not found on way back
fGeom->SetCurrentPoint(&array1[3*ist1+3]);
fGeom->FindNode();
pm = (TPolyMarker3D*)pma->At(1);
pm->SetNextPoint(array2[3*ist1+3], array2[3*ist1+4], array2[3*ist1+5]);
printf("### BOUNDARY MISSED BACK #########################n");
ist1++;
break;
} else {
ist1++;
break;
}
}
}
}
}
pm = (TPolyMarker3D*)pma->At(0);
pm->Draw("SAME");
pm = (TPolyMarker3D*)pma->At(1);
pm->Draw("SAME");
pm = (TPolyMarker3D*)pma->At(2);
pm->Draw("SAME");
if (gPad) {
gPad->Modified();
gPad->Update();
}
delete [] array1;
delete [] array2;
}
//-----------------------------------------------------------------------------
void TGeoChecker::CheckOverlaps(const TGeoVolume *vol, Double_t ovlp, Option_t * /*option*/) const
{
// Check illegal overlaps for volume VOL within a limit OVLP.
if (vol->GetFinder()) return;
Int_t nd = vol->GetNdaughters();
if (!nd) return;
// first, test if daughters extrude their container
TGeoShape *shapem = vol->GetShape();
TGeoNode * node;
TGeoMatrix *matrix;
X3DPoints *buff;
Bool_t extrude, isextrusion, isoverlapping;
TGeoOverlap *nodeovlp = 0;
Bool_t ismany;
Double_t *points;
Double_t local[3];
Double_t point[3];
Double_t safety = 1e30; //TGeoShape::kBig
Int_t id, ip;
for (id=0; id<nd; id++) {
node = vol->GetNode(id);
buff = (X3DPoints*)node->GetVolume()->Make3DBuffer();
if (!buff) {
Error("CheckOverlaps", "could not fill X3D buffer for node %s", node->GetName());
return;
}
matrix = node->GetMatrix();
ismany = node->IsOverlapping();
points = buff->points;
isextrusion=kFALSE;
// loop all points
for (ip=0; ip<buff->numPoints; ip++) {
memcpy(local, &points[3*ip], 3*sizeof(Double_t));
matrix->LocalToMaster(local, point);
extrude = !shapem->Contains(point);
if (extrude) {
safety = shapem->Safety(point, kFALSE);
if (safety<ovlp) extrude=kFALSE;
}
if (extrude) {
if (!isextrusion) {
isextrusion = kTRUE;
char *name = new char[20];
sprintf(name,"%s_x_%i", vol->GetName(),id);
nodeovlp = new TGeoExtrusion(name, (TGeoVolume*)vol,id,safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
fGeom->AddOverlap(nodeovlp);
} else {
if (safety>nodeovlp->GetOverlap()) nodeovlp->SetOverlap(safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
}
}
}
if (points) delete [] points;
delete buff;
}
// now check if the daughters overlap with each other
if (nd<2) return;
TGeoVoxelFinder *vox = vol->GetVoxels();
TGeoNode *node1;
TGeoMatrix *matrix1;
TGeoShape *shape1;
Bool_t ismany1, overlap;
Int_t novlp;
Int_t *ovlps;
Int_t ko, io;
for (id=0; id<nd; id++) {
node = vol->GetNode(id);
ismany = node->IsOverlapping();
if (ismany) continue;
shapem = node->GetVolume()->GetShape();
matrix = node->GetMatrix();
if (vox) {
vox->FindOverlaps(id);
ovlps = node->GetOverlaps(novlp);
if (!ovlps) continue;
} else continue;
for (ko=0; ko<novlp; ko++) {
io = ovlps[ko];
if (io<id) continue;
node1 = vol->GetNode(io);
ismany1 = node1->IsOverlapping();
if (ismany1) continue;
matrix1 = node1->GetMatrix();
buff = (X3DPoints*)node1->GetVolume()->Make3DBuffer();
if (!buff) continue;
points = buff->points;
// loop all points
overlap = kFALSE;
isoverlapping = kFALSE;
for (ip=0; ip<buff->numPoints; ip++) {
memcpy(local, &points[3*ip], 3*sizeof(Double_t));
matrix1->LocalToMaster(local, point);
matrix->MasterToLocal(point, local); // now point in local reference of node
overlap = shapem->Contains(local);
if (overlap) {
safety = shapem->Safety(local, kTRUE);
if (safety<ovlp) overlap=kFALSE;
}
if (overlap) {
if (!isoverlapping) {
isoverlapping = kTRUE;
char *name = new char[20];
sprintf(name,"%s_o_%i_%i", vol->GetName(),id,io);
nodeovlp = new TGeoNodeOverlap(name, (TGeoVolume*)vol,id,io,safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
fGeom->AddOverlap(nodeovlp);
} else {
if (safety>nodeovlp->GetOverlap()) nodeovlp->SetOverlap(safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
}
}
}
if (points) delete [] points;
delete buff;
shape1 = node1->GetVolume()->GetShape();
buff = (X3DPoints*)node->GetVolume()->Make3DBuffer();
if (!buff) continue;
points = buff->points;
// loop all points
for (ip=0; ip<buff->numPoints; ip++) {
memcpy(local, &points[3*ip], 3*sizeof(Double_t));
matrix->LocalToMaster(local, point);
matrix1->MasterToLocal(point, local); // now point in local reference of node
overlap = shape1->Contains(local);
if (overlap) {
safety = shape1->Safety(local, kTRUE);
if (safety<ovlp) overlap=kFALSE;
}
if (overlap) {
if (!isoverlapping) {
isoverlapping = kTRUE;
char *name = new char[20];
sprintf(name,"%s_o_%i_%i", vol->GetName(),id,io);
nodeovlp = new TGeoNodeOverlap(name, (TGeoVolume*)vol,id,io,safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
fGeom->AddOverlap(nodeovlp);
} else {
if (safety>nodeovlp->GetOverlap()) nodeovlp->SetOverlap(safety);
nodeovlp->SetNextPoint(point[0],point[1],point[2]);
}
}
}
if (points) delete [] points;
delete buff;
}
node->SetOverlaps(0,0);
}
}
//-----------------------------------------------------------------------------
void TGeoChecker::PrintOverlaps() const
{
// Print the current list of overlaps held by the manager class.
TIter next(fGeom->GetListOfOverlaps());
TGeoOverlap *ov;
printf("=== Overlaps for %s ===n", fGeom->GetName());
while ((ov=(TGeoOverlap*)next())) ov->PrintInfo();
}
//-----------------------------------------------------------------------------
void TGeoChecker::CheckPoint(Double_t x, Double_t y, Double_t z, Option_t *)
{
//--- Draw point (x,y,z) over the picture of the daughers of the volume containing this point.
// Generates a report regarding the path to the node containing this point and the distance to
// the closest boundary.
Double_t point[3];
Double_t local[3];
point[0] = x;
point[1] = y;
point[2] = z;
TGeoVolume *vol = fGeom->GetTopVolume();
if (fVsafe) {
TGeoNode *old = fVsafe->GetNode("SAFETY_1");
if (old) fVsafe->GetNodes()->RemoveAt(vol->GetNdaughters()-1);
}
// if (vol != fGeom->GetMasterVolume()) fGeom->RestoreMasterVolume();
TGeoNode *node = fGeom->FindNode(point[0], point[1], point[2]);
fGeom->MasterToLocal(point, local);
// get current node
printf("=== Check current point : (%g, %g, %g) ===n", point[0], point[1], point[2]);
printf(" - path : %sn", fGeom->GetPath());
// get corresponding volume
if (node) vol = node->GetVolume();
// compute safety distance (distance to boundary ignored)
Double_t close = fGeom->Safety();
printf("Safety radius : %fn", close);
if (close>1E-4) {
TGeoVolume *sph = fGeom->MakeSphere("SAFETY", vol->GetMedium(), 0, close, 0,180,0,360);
sph->SetLineColor(2);
sph->SetLineStyle(3);
vol->AddNode(sph,1,new TGeoTranslation(local[0], local[1], local[2]));
fVsafe = vol;
}
TPolyMarker3D *pm = new TPolyMarker3D();
pm->SetMarkerColor(2);
pm->SetMarkerStyle(8);
pm->SetMarkerSize(0.5);
pm->SetNextPoint(local[0], local[1], local[2]);
if (vol->GetNdaughters()<2) fGeom->SetTopVisible();
else fGeom->SetTopVisible(kFALSE);
fGeom->SetVisLevel(1);
if (!vol->IsVisible()) vol->SetVisibility(kTRUE);
vol->Draw();
pm->Draw("SAME");
gPad->Modified();
gPad->Update();
}
//-----------------------------------------------------------------------------
TH2F *TGeoChecker::LegoPlot(Int_t ntheta, Double_t themin, Double_t themax,
Int_t nphi, Double_t phimin, Double_t phimax,
Double_t /*rmin*/, Double_t /*rmax*/, Option_t *option)
{
// Generate a lego plot fot the top volume, according to option.
TH2F *hist = new TH2F("lego", option, nphi, phimin, phimax, ntheta, themin, themax);
Double_t degrad = TMath::Pi()/180.;
Double_t theta, phi, step, matprop, x;
Double_t start[3];
Double_t dir[3];
TGeoNode *startnode, *endnode;
Int_t i; // loop index for phi
Int_t j; // loop index for theta
Int_t ntot = ntheta * nphi;
Int_t n10 = ntot/10;
Int_t igen = 0, iloop=0;
printf("=== Lego plot sph. => nrays=%in", ntot);
for (i=1; i<=nphi; i++) {
for (j=1; j<=ntheta; j++) {
igen++;
if (n10) {
if ((igen%n10) == 0) printf("%i percentn", Int_t(100*igen/ntot));
}
x = 0;
theta = hist->GetYaxis()->GetBinCenter(j);
phi = hist->GetXaxis()->GetBinCenter(i)+1E-3;
start[0] = start[1] = start[2] = 1E-3;
dir[0]=TMath::Sin(theta*degrad)*TMath::Cos(phi*degrad);
dir[1]=TMath::Sin(theta*degrad)*TMath::Sin(phi*degrad);
dir[2]=TMath::Cos(theta*degrad);
fGeom->InitTrack(&start[0], &dir[0]);
startnode = fGeom->GetCurrentNode();
if (fGeom->IsOutside()) startnode=0;
if (startnode) {
matprop = startnode->GetVolume()->GetMaterial()->GetRadLen();
} else {
matprop = 0.;
}
fGeom->FindNextBoundary();
// fGeom->IsStepEntering();
// find where we end-up
endnode = fGeom->Step();
step = fGeom->GetStep();
while (step<1E10) {
// now see if we can make an other step
iloop=0;
while (!fGeom->IsEntering()) {
iloop++;
fGeom->SetStep(1E-3);
step += 1E-3;
endnode = fGeom->Step();
}
if (iloop>1000) printf("%i stepsn", iloop);
if (matprop>0) {
x += step/matprop;
}
if (endnode==0 && step>1E10) break;
// generate an extra step to cross boundary
startnode = endnode;
if (startnode) {
matprop = startnode->GetVolume()->GetMaterial()->GetRadLen();
} else {
matprop = 0.;
}
fGeom->FindNextBoundary();
endnode = fGeom->Step();
step = fGeom->GetStep();
}
hist->Fill(phi, theta, x);
}
}
return hist;
}
//______________________________________________________________________________
void TGeoChecker::RandomPoints(TGeoVolume *vol, Int_t npoints, Option_t *option)
{
// Draw random points in the bounding box of a volume.
if (!vol) return;
gRandom = new TRandom3();
vol->VisibleDaughters(kTRUE);
vol->Draw();
TString opt = option;
opt.ToLower();
TObjArray *pm = new TObjArray(128);
TPolyMarker3D *marker = 0;
const TGeoShape *shape = vol->GetShape();
TGeoBBox *box = (TGeoBBox *)shape;
Double_t dx = box->GetDX();
Double_t dy = box->GetDY();
Double_t dz = box->GetDZ();
Double_t ox = (box->GetOrigin())[0];
Double_t oy = (box->GetOrigin())[1];
Double_t oz = (box->GetOrigin())[2];
Double_t *xyz = new Double_t[3];
printf("Random box : %f, %f, %fn", dx, dy, dz);
TGeoNode *node = 0;
printf("Start... %i pointsn", npoints);
Int_t i=0;
Int_t igen=0;
Int_t ic = 0;
Int_t n10 = npoints/10;
Double_t ratio=0;
while (igen<npoints) {
xyz[0] = ox-dx+2*dx*gRandom->Rndm();
xyz[1] = oy-dy+2*dy*gRandom->Rndm();
xyz[2] = oz-dz+2*dz*gRandom->Rndm();
fGeom->SetCurrentPoint(xyz);
igen++;
if (n10) {
if ((igen%n10) == 0) printf("%i percentn", Int_t(100*igen/npoints));
}
node = fGeom->FindNode();
if (!node) continue;
if (!node->IsOnScreen()) continue;
// draw only points in overlapping/non-overlapping volumes
if (opt.Contains("many") && !node->IsOverlapping()) continue;
if (opt.Contains("only") && node->IsOverlapping()) continue;
ic = node->GetColour();
if ((ic<0) || (ic>=128)) ic = 0;
marker = (TPolyMarker3D*)pm->At(ic);
if (!marker) {
marker = new TPolyMarker3D();
marker->SetMarkerColor(ic);
marker->SetMarkerStyle(8);
marker->SetMarkerSize(0.4);
pm->AddAt(marker, ic);
}
marker->SetNextPoint(xyz[0], xyz[1], xyz[2]);
i++;
}
printf("Number of visible points : %in", i);
ratio = (Double_t)i/(Double_t)igen;
printf("efficiency : %gn", ratio);
for (Int_t m=0; m<128; m++) {
marker = (TPolyMarker3D*)pm->At(m);
if (marker) marker->Draw("SAME");
}
fGeom->GetTopVolume()->VisibleDaughters(kFALSE);
printf("---Daughters of %s made invisible.n", fGeom->GetTopVolume()->GetName());
printf("---Make them visible with : gGeoManager->GetTopVolume()->VisibleDaughters();n");
delete pm;
delete xyz;
}
//-----------------------------------------------------------------------------
void TGeoChecker::RandomRays(Int_t nrays, Double_t startx, Double_t starty, Double_t startz)
{
// Randomly shoot nrays from point (startx,starty,startz) and plot intersections
// with surfaces for current top node.
TObjArray *pm = new TObjArray(128);
TPolyLine3D *line = 0;
gRandom = new TRandom3();
TGeoVolume *vol=fGeom->GetTopVolume();
vol->VisibleDaughters(kTRUE);
Double_t start[3];
Double_t dir[3];
Int_t istep= 0;
Double_t *point = fGeom->GetCurrentPoint();
vol->Draw();
printf("Start... %i raysn", nrays);
TGeoNode *startnode, *endnode;
Bool_t vis1,vis2;
Int_t i=0;
Int_t ipoint;
Int_t itot=0;
Int_t n10=nrays/10;
Double_t theta,phi, step;
while (itot<nrays) {
itot++;
ipoint = 0;
if (n10) {
if ((itot%n10) == 0) printf("%i percentn", Int_t(100*itot/nrays));
}
start[0] = startx;
start[1] = starty;
start[2] = startz;
phi = 2*TMath::Pi()*gRandom->Rndm();
theta= TMath::ACos(1.-2.*gRandom->Rndm());
dir[0]=TMath::Sin(theta)*TMath::Cos(phi);
dir[1]=TMath::Sin(theta)*TMath::Sin(phi);
dir[2]=TMath::Cos(theta);
startnode = fGeom->InitTrack(start[0],start[1],start[2], dir[0],dir[1],dir[2]);
line = 0;
if (fGeom->IsOutside()) startnode=0;
vis1 = (startnode)?(startnode->IsOnScreen()):kFALSE;
if (vis1) {
line = new TPolyLine3D(2);
line->SetLineColor(startnode->GetVolume()->GetLineColor());
line->SetPoint(ipoint++, startx, starty, startz);
i++;
pm->Add(line);
}
// find where we end-up
fGeom->FindNextBoundary();
step = fGeom->GetStep();
endnode = fGeom->Step();
vis2 = (endnode)?(endnode->IsOnScreen()):kFALSE;
while (step<1E10) {
istep = 0;
while (!fGeom->IsEntering()) {
istep++;
if (istep>1E4) break;
fGeom->SetStep(1E-3);
endnode = fGeom->Step();
step += 1E-3;
}
if (istep>1E4) break;
// if (istep) printf("ADDED : %f (%i steps)n", istep*1E-3, istep);
vis2 = (endnode)?(endnode->IsOnScreen()):kFALSE;
if (ipoint>0) {
// old visible node had an entry point -> finish segment
line->SetPoint(ipoint, point[0], point[1], point[2]);
ipoint = 0;
line = 0;
}
if (vis2) {
// create new segment
line = new TPolyLine3D(2);
line->SetLineColor(endnode->GetVolume()->GetLineColor());
line->SetPoint(ipoint++, point[0], point[1], point[2]);
i++;
pm->Add(line);
}
// now see if we can make an other step
if (endnode==0 && step>1E10) break;
// generate an extra step to cross boundary
startnode = endnode;
fGeom->FindNextBoundary();
step = fGeom->GetStep();
endnode = fGeom->Step();
}
}
// draw all segments
for (Int_t m=0; m<pm->GetEntriesFast(); m++) {
line = (TPolyLine3D*)pm->At(m);
if (line) line->Draw("SAME");
}
printf("number of segments : %in", i);
fGeom->GetTopVolume()->VisibleDaughters(kFALSE);
printf("---Daughters of %s made invisible.n", fGeom->GetTopVolume()->GetName());
printf("---Make them visible with : gGeoManager->GetTopVolume()->VisibleDaughters();n");
delete pm;
}
//-----------------------------------------------------------------------------
TGeoNode *TGeoChecker::SamplePoints(Int_t npoints, Double_t &dist, Double_t epsil,
const char* g3path)
{
// shoot npoints randomly in a box of 1E-5 arround current point.
// return minimum distance to points outside
// make sure that path to current node is updated
// get the response of tgeo
TGeoNode *node = fGeom->FindNode();
TGeoNode *nodegeo = 0;
TGeoNode *nodeg3 = 0;
TGeoNode *solg3 = 0;
if (!node) {dist=-1; return 0;}
gRandom = new TRandom3();
Bool_t hasg3 = kFALSE;
if (strlen(g3path)) hasg3 = kTRUE;
char geopath[200];
sprintf(geopath, "%sn", fGeom->GetPath());
dist = 1E10;
TString common = "";
// cd to common path
Double_t point[3];
Double_t closest[3];
TGeoNode *node1 = 0;
TGeoNode *node_close = 0;
dist = 1E10;
Double_t dist1 = 0;
// initialize size of random box to epsil
Double_t eps[3];
eps[0] = epsil; eps[1]=epsil; eps[2]=epsil;
Double_t *pointg = fGeom->GetCurrentPoint();
if (hasg3) {
TString spath = geopath;
TString name = "";
Int_t index=0;
while (index>=0) {
index = spath.Index("/", index+1);
if (index>0) {
name = spath(0, index);
if (strstr(g3path, name.Data())) {
common = name;
continue;
} else break;
}
}
// if g3 response was given, cd to common path
if (strlen(common.Data())) {
while (strcmp(fGeom->GetPath(), common.Data()) && fGeom->GetLevel()) {
nodegeo = fGeom->GetCurrentNode();
fGeom->CdUp();
}
fGeom->cd(g3path);
solg3 = fGeom->GetCurrentNode();
while (strcmp(fGeom->GetPath(), common.Data()) && fGeom->GetLevel()) {
nodeg3 = fGeom->GetCurrentNode();
fGeom->CdUp();
}
if (!nodegeo) return 0;
if (!nodeg3) return 0;
fGeom->cd(common.Data());
fGeom->MasterToLocal(fGeom->GetCurrentPoint(), &point[0]);
Double_t xyz[3], local[3];
for (Int_t i=0; i<npoints; i++) {
xyz[0] = point[0] - eps[0] + 2*eps[0]*gRandom->Rndm();
xyz[1] = point[1] - eps[1] + 2*eps[1]*gRandom->Rndm();
xyz[2] = point[2] - eps[2] + 2*eps[2]*gRandom->Rndm();
nodeg3->MasterToLocal(&xyz[0], &local[0]);
if (!nodeg3->GetVolume()->Contains(&local[0])) continue;
dist1 = TMath::Sqrt((xyz[0]-point[0])*(xyz[0]-point[0])+
(xyz[1]-point[1])*(xyz[1]-point[1])+(xyz[2]-point[2])*(xyz[2]-point[2]));
if (dist1<dist) {
// save node and closest point
dist = dist1;
node_close = solg3;
// make the random box smaller
eps[0] = TMath::Abs(point[0]-pointg[0]);
eps[1] = TMath::Abs(point[1]-pointg[1]);
eps[2] = TMath::Abs(point[2]-pointg[2]);
}
}
}
if (!node_close) dist = -1;
return node_close;
}
// gRandom = new TRandom3();
// save current point
memcpy(&point[0], pointg, 3*sizeof(Double_t));
for (Int_t i=0; i<npoints; i++) {
// generate a random point in MARS
pointg[0] = point[0] - eps[0] + 2*eps[0]*gRandom->Rndm();
pointg[1] = point[1] - eps[1] + 2*eps[1]*gRandom->Rndm();
pointg[2] = point[2] - eps[2] + 2*eps[2]*gRandom->Rndm();
// check if new node is different from the old one
if (node1!=node) {
dist1 = TMath::Sqrt((point[0]-pointg[0])*(point[0]-pointg[0])+
(point[1]-pointg[1])*(point[1]-pointg[1])+(point[2]-pointg[2])*(point[2]-pointg[2]));
if (dist1<dist) {
dist = dist1;
node_close = node1;
memcpy(&closest[0], pointg, 3*sizeof(Double_t));
// make the random box smaller
eps[0] = TMath::Abs(point[0]-pointg[0]);
eps[1] = TMath::Abs(point[1]-pointg[1]);
eps[2] = TMath::Abs(point[2]-pointg[2]);
}
}
}
// restore the original point and path
memcpy(pointg, &point[0], 3*sizeof(Double_t));
fGeom->FindNode(); // really needed ?
if (!node_close) dist=-1;
return node_close;
}
//-----------------------------------------------------------------------------
void TGeoChecker::ShootRay(Double_t *start, Double_t dirx, Double_t diry, Double_t dirz, Double_t *array, Int_t &nelem, Int_t &dim, Double_t *endpoint) const
{
// Shoot one ray from start point with direction (dirx,diry,dirz). Fills input array
// with points just after boundary crossings.
// Int_t array_dimension = 3*dim;
nelem = 0;
Int_t istep = 0;
if (!dim) {
printf("empty input arrayn");
return;
}
// fGeom->CdTop();
Double_t *point = fGeom->GetCurrentPoint();
TGeoNode *endnode;
Bool_t is_entering;
Double_t step, forward;
Double_t dir[3];
dir[0] = dirx;
dir[1] = diry;
dir[2] = dirz;
fGeom->InitTrack(start, &dir[0]);
fGeom->GetCurrentNode();
// printf("Start : (%f,%f,%f)n", point[0], point[1], point[2]);
fGeom->FindNextBoundary();
step = fGeom->GetStep();
// printf("---next : at step=%fn", step);
if (step>1E10) return;
endnode = fGeom->Step();
is_entering = fGeom->IsEntering();
while (step<1E10) {
if (endpoint) {
forward = dirx*(endpoint[0]-point[0])+diry*(endpoint[1]-point[1])+dirz*(endpoint[2]-point[2]);
if (forward<1E-3) {
// printf("exit : Passed start point. nelem=%in", nelem);
return;
}
}
if (is_entering) {
if (nelem>=dim) {
Double_t *temparray = new Double_t[3*(dim+20)];
memcpy(temparray, array, 3*dim*sizeof(Double_t));
delete [] array;
array = temparray;
dim += 20;
}
memcpy(&array[3*nelem], point, 3*sizeof(Double_t));
// printf("%i (%f, %f, %f) step=%fn", nelem, point[0], point[1], point[2], step);
nelem++;
} else {
if (endnode==0 && step>1E10) {
// printf("exit : NULL endnode. nelem=%in", nelem);
return;
}
if (!fGeom->IsEntering()) {
// if (startnode) printf("stepping %f from (%f, %f, %f) inside %s...n", step,point[0], point[1], point[2], startnode->GetName());
// else printf("stepping %f from (%f, %f, %f) OUTSIDE...n", step,point[0], point[1], point[2]);
istep = 0;
}
while (!fGeom->IsEntering()) {
istep++;
if (istep>1E3) {
// Error("ShootRay", "more than 1000 steps. Step was %f", step);
nelem = 0;
return;
}
fGeom->SetStep(1E-5);
endnode = fGeom->Step();
}
if (istep>0) printf("%i stepsn", istep);
if (nelem>=dim) {
Double_t *temparray = new Double_t[3*(dim+20)];
memcpy(temparray, array, 3*dim*sizeof(Double_t));
delete [] array;
array = temparray;
dim += 20;
}
memcpy(&array[3*nelem], point, 3*sizeof(Double_t));
// if (endnode) printf("%i (%f, %f, %f) step=%fn", nelem, point[0], point[1], point[2], step);
nelem++;
is_entering = kTRUE;
}
fGeom->FindNextBoundary();
step = fGeom->GetStep();
// printf("---next at step=%fn", step);
endnode = fGeom->Step();
is_entering = fGeom->IsEntering();
}
// printf("exit : INFINITE step. nelem=%in", nelem);
}
//-----------------------------------------------------------------------------
void TGeoChecker::Test(Int_t npoints, Option_t *option)
{
// Check time of finding "Where am I" for n points.
gRandom= new TRandom3();
Bool_t recheck = !strcmp(option, "RECHECK");
if (recheck) printf("RECHECKn");
const TGeoShape *shape = fGeom->GetTopVolume()->GetShape();
Double_t dx = ((TGeoBBox*)shape)->GetDX();
Double_t dy = ((TGeoBBox*)shape)->GetDY();
Double_t dz = ((TGeoBBox*)shape)->GetDZ();
Double_t ox = (((TGeoBBox*)shape)->GetOrigin())[0];
Double_t oy = (((TGeoBBox*)shape)->GetOrigin())[1];
Double_t oz = (((TGeoBBox*)shape)->GetOrigin())[2];
Double_t *xyz = new Double_t[3*npoints];
TStopwatch *timer = new TStopwatch();
printf("Random box : %f, %f, %fn", dx, dy, dz);
timer->Start(kFALSE);
Int_t i;
for (i=0; i<npoints; i++) {
xyz[3*i] = ox-dx+2*dx*gRandom->Rndm();
xyz[3*i+1] = oy-dy+2*dy*gRandom->Rndm();
xyz[3*i+2] = oz-dz+2*dz*gRandom->Rndm();
}
timer->Stop();
printf("Generation time :n");
timer->Print();
timer->Reset();
TGeoNode *node, *node1;
printf("Start... %i pointsn", npoints);
timer->Start(kFALSE);
for (i=0; i<npoints; i++) {
fGeom->SetCurrentPoint(xyz+3*i);
if (recheck) fGeom->CdTop();
node = fGeom->FindNode();
if (recheck) {
node1 = fGeom->FindNode();
if (node1 != node) {
printf("Difference for x=%g y=%g z=%gn", xyz[3*i], xyz[3*i+1], xyz[3*i+2]);
printf(" from top : %sn", node->GetName());
printf(" redo : %sn", fGeom->GetPath());
}
}
}
timer->Stop();
timer->Print();
delete xyz;
delete timer;
}
//-----------------------------------------------------------------------------
void TGeoChecker::TestOverlaps(const char* path)
{
//--- Geometry overlap checker based on sampling.
if (fGeom->GetTopVolume()!=fGeom->GetMasterVolume()) fGeom->RestoreMasterVolume();
printf("Checking overlaps for path :n");
if (!fGeom->cd(path)) return;
TGeoNode *checked = fGeom->GetCurrentNode();
checked->InspectNode();
// shoot 1E4 points in the shape of the current volume
gRandom= new TRandom3();
Int_t npoints = 1000000;
Double_t big = 1E6;
Double_t xmin = big;
Double_t xmax = -big;
Double_t ymin = big;
Double_t ymax = -big;
Double_t zmin = big;
Double_t zmax = -big;
TObjArray *pm = new TObjArray(128);
TPolyMarker3D *marker = 0;
TPolyMarker3D *markthis = new TPolyMarker3D();
markthis->SetMarkerColor(5);
TNtuple *ntpl = new TNtuple("ntpl","random points","x:y:z");
TGeoShape *shape = fGeom->GetCurrentNode()->GetVolume()->GetShape();
Double_t *point = new Double_t[3];
Double_t dx = ((TGeoBBox*)shape)->GetDX();
Double_t dy = ((TGeoBBox*)shape)->GetDY();
Double_t dz = ((TGeoBBox*)shape)->GetDZ();
Double_t ox = (((TGeoBBox*)shape)->GetOrigin())[0];
Double_t oy = (((TGeoBBox*)shape)->GetOrigin())[1];
Double_t oz = (((TGeoBBox*)shape)->GetOrigin())[2];
Double_t *xyz = new Double_t[3*npoints];
Int_t i=0;
printf("Generating %i points inside %sn", npoints, fGeom->GetPath());
while (i<npoints) {
point[0] = ox-dx+2*dx*gRandom->Rndm();
point[1] = oy-dy+2*dy*gRandom->Rndm();
point[2] = oz-dz+2*dz*gRandom->Rndm();
if (!shape->Contains(point)) continue;
// convert each point to MARS
// printf("local %9.3f %9.3f %9.3fn", point[0], point[1], point[2]);
fGeom->LocalToMaster(point, &xyz[3*i]);
// printf("master %9.3f %9.3f %9.3fn", xyz[3*i], xyz[3*i+1], xyz[3*i+2]);
xmin = TMath::Min(xmin, xyz[3*i]);
xmax = TMath::Max(xmax, xyz[3*i]);
ymin = TMath::Min(ymin, xyz[3*i+1]);
ymax = TMath::Max(ymax, xyz[3*i+1]);
zmin = TMath::Min(zmin, xyz[3*i+2]);
zmax = TMath::Max(zmax, xyz[3*i+2]);
i++;
}
delete point;
ntpl->Fill(xmin,ymin,zmin);
ntpl->Fill(xmax,ymin,zmin);
ntpl->Fill(xmin,ymax,zmin);
ntpl->Fill(xmax,ymax,zmin);
ntpl->Fill(xmin,ymin,zmax);
ntpl->Fill(xmax,ymin,zmax);
ntpl->Fill(xmin,ymax,zmax);
ntpl->Fill(xmax,ymax,zmax);
ntpl->Draw("z:y:x");
// shoot the poins in the geometry
TGeoNode *node;
TString cpath;
Int_t ic=0;
TObjArray *overlaps = new TObjArray();
printf("using FindNode...n");
for (Int_t j=0; j<npoints; j++) {
// always start from top level (testing only)
fGeom->CdTop();
fGeom->SetCurrentPoint(&xyz[3*j]);
node = fGeom->FindNode();
cpath = fGeom->GetPath();
if (cpath.Contains(path)) {
markthis->SetNextPoint(xyz[3*j], xyz[3*j+1], xyz[3*j+2]);
continue;
}
// current point is found in an overlapping node
if (!node) ic=128;
else ic = node->GetVolume()->GetLineColor();
if (ic >= 128) ic = 0;
marker = (TPolyMarker3D*)pm->At(ic);
if (!marker) {
marker = new TPolyMarker3D();
marker->SetMarkerColor(ic);
pm->AddAt(marker, ic);
}
// draw the overlapping point
marker->SetNextPoint(xyz[3*j], xyz[3*j+1], xyz[3*j+2]);
if (node) {
if (overlaps->IndexOf(node) < 0) overlaps->Add(node);
}
}
// draw all overlapping points
for (Int_t m=0; m<128; m++) {
marker = (TPolyMarker3D*)pm->At(m);
// if (marker) marker->Draw("SAME");
}
markthis->Draw("SAME");
if (gPad) gPad->Update();
// display overlaps
if (overlaps->GetEntriesFast()) {
printf("list of overlapping nodes :n");
for (i=0; i<overlaps->GetEntriesFast(); i++) {
node = (TGeoNode*)overlaps->At(i);
if (node->IsOverlapping()) printf("%s MANYn", node->GetName());
else printf("%s ONLYn", node->GetName());
}
} else printf("No overlapsn");
delete ntpl;
delete pm;
delete xyz;
delete overlaps;
}
//-----------------------------------------------------------------------------
Double_t TGeoChecker::Weight(Double_t precision, Option_t *option)
{
// Estimate weight of top level volume with a precision SIGMA(W)/W
// better than PRECISION. Option can be "v" - verbose (default).
TList *matlist = fGeom->GetListOfMaterials();
Int_t nmat = matlist->GetSize();
if (!nmat) return 0;
Int_t *nin = new Int_t[nmat];
memset(nin, 0, nmat*sizeof(Int_t));
gRandom = new TRandom3();
TString opt = option;
opt.ToLower();
Bool_t isverbose = opt.Contains("v");
TGeoBBox *box = (TGeoBBox *)fGeom->GetTopVolume()->GetShape();
Double_t dx = box->GetDX();
Double_t dy = box->GetDY();
Double_t dz = box->GetDZ();
Double_t ox = (box->GetOrigin())[0];
Double_t oy = (box->GetOrigin())[1];
Double_t oz = (box->GetOrigin())[2];
Double_t x,y,z;
TGeoNode *node;
TGeoMaterial *mat;
Double_t vbox = 0.000008*dx*dy*dz; // m3
Bool_t end = kFALSE;
Double_t weight=0, sigma, eps, dens;
Double_t eps0=1.;
Int_t indmat;
Int_t igen=0;
Int_t iin = 0;
while (!end) {
x = ox-dx+2*dx*gRandom->Rndm();
y = oy-dy+2*dy*gRandom->Rndm();
z = oz-dz+2*dz*gRandom->Rndm();
node = fGeom->FindNode(x,y,z);
igen++;
if (!node) continue;
mat = node->GetVolume()->GetMedium()->GetMaterial();
indmat = mat->GetIndex();
if (indmat<0) continue;
nin[indmat]++;
iin++;
if ((iin%100000)==0 || igen>1E8) {
weight = 0;
sigma = 0;
for (indmat=0; indmat<nmat; indmat++) {
mat = (TGeoMaterial*)matlist->At(indmat);
dens = mat->GetDensity(); // [g/cm3]
if (dens<1E-2) dens=0;
dens *= 1000.; // [kg/m3]
weight += dens*Double_t(nin[indmat]);
sigma += dens*dens*nin[indmat];
}
sigma = TMath::Sqrt(sigma);
eps = sigma/weight;
weight *= vbox/Double_t(igen);
sigma *= vbox/Double_t(igen);
if (eps<precision || igen>1E8) {
if (isverbose) {
printf("=== Weight of %s : %g +/- %g [kg]n",
fGeom->GetTopVolume()->GetName(), weight, sigma);
}
end = kTRUE;
} else {
if (isverbose && eps<0.5*eps0) {
printf("%8dK: %14.7g kg %g %%n",
igen/1000, weight, eps*100);
eps0 = eps;
}
}
}
}
delete [] nin;
return weight;
}
//-----------------------------------------------------------------------------
Double_t TGeoChecker::CheckVoxels(TGeoVolume *vol, TGeoVoxelFinder *voxels, Double_t *xyz, Int_t npoints)
{
// count voxel timing
TStopwatch timer;
Double_t time;
TGeoShape *shape = vol->GetShape();
TGeoNode *node;
TGeoMatrix *matrix;
Double_t *point;
Double_t local[3];
Int_t *checklist;
Int_t ncheck;
timer.Start();
for (Int_t i=0; i<npoints; i++) {
point = xyz + 3*i;
if (!shape->Contains(point)) continue;
checklist = voxels->GetCheckList(point, ncheck);
if (!checklist) continue;
if (!ncheck) continue;
for (Int_t id=0; id<ncheck; id++) {
node = vol->GetNode(checklist[id]);
matrix = node->GetMatrix();
matrix->MasterToLocal(point, &local[0]);
if (node->GetVolume()->GetShape()->Contains(&local[0])) break;
}
}
time = timer.CpuTime();
return time;
}
//-----------------------------------------------------------------------------
Bool_t TGeoChecker::TestVoxels(TGeoVolume *vol, Int_t npoints)
{
// Returns optimal voxelization type for volume vol.
// kFALSE - cartesian
// kTRUE - cylindrical
TGeoVoxelFinder *voxels = vol->GetVoxels();
if (!voxels) return kFALSE;
gRandom= new TRandom3();
const TGeoShape *shape = vol->GetShape();
Double_t dx = ((TGeoBBox*)shape)->GetDX();
Double_t dy = ((TGeoBBox*)shape)->GetDY();
Double_t dz = ((TGeoBBox*)shape)->GetDZ();
Double_t ox = (((TGeoBBox*)shape)->GetOrigin())[0];
Double_t oy = (((TGeoBBox*)shape)->GetOrigin())[1];
Double_t oz = (((TGeoBBox*)shape)->GetOrigin())[2];
Double_t *xyz = new Double_t[3*npoints];
Int_t i;
// generate npoints
for (i=0; i<npoints; i++) {
xyz[3*i] = ox-dx+2*dx*gRandom->Rndm();
xyz[3*i+1] = oy-dy+2*dy*gRandom->Rndm();
xyz[3*i+2] = oz-dz+2*dz*gRandom->Rndm();
}
Bool_t voxtype = vol->IsCylVoxels();
Double_t time1, time2;
TGeoVoxelFinder *vox1, *vox2;
// build both voxelization types
if (voxtype) {
printf(" default voxelization was cylindrical.n");
vox2 = voxels;
vox1 = new TGeoVoxelFinder(vol);
vox1->Voxelize("");
if (!vol->GetVoxels()) {
vol->SetVoxelFinder(voxels);
delete xyz;
return voxtype;
}
} else {
printf(" default voxelization was cartesian.n");
vox1 = voxels;
vox2 = new TGeoCylVoxels(vol);
vox2->Voxelize("");
if (!vol->GetVoxels()) {
vol->SetVoxelFinder(voxels);
delete xyz;
return voxtype;
}
}
// count both voxelization timings
time1 = CheckVoxels(vol, vox1, xyz, npoints);
time2 = CheckVoxels(vol, vox2, xyz, npoints);
printf(" --- time for XYZ : %gn", time1);
printf(" --- time for cyl : %gn", time2);
if (time1<time2) {
printf(" best : XYZn");
delete vox2;
vol->SetVoxelFinder(vox1);
vol->SetCylVoxels(kFALSE);
delete xyz;
return kFALSE;
}
printf(" best : cyln");
delete vox1;
vol->SetVoxelFinder(vox2);
vol->SetCylVoxels(kTRUE);
delete xyz;
return kTRUE;
}
//-----------------------------------------------------------------------------
void TGeoChecker::CreateTree(const char * /*treename*/, const char * /*filename*/)
{
// These points are stored in a tree and can be directly visualized within ROOT.
//
/*
 */
//
}
//-----------------------------------------------------------------------------
void TGeoChecker::Generate(UInt_t /*npoint*/)
{
// Points are randomly generated inside the
// bounding box of a node. For each point the distance to the nearest surface
// and the corresponding point on that surface are computed.
//
/*
*/
//
}
//-----------------------------------------------------------------------------
void TGeoChecker::Raytrace(Double_t * /*startpoint*/, UInt_t /*npoints*/)
{
// A second algoritm is shooting multiple rays from a given point to a geometry
// branch and storing the intersection points with surfaces in same tree.
// Rays can be traced backwords in order to find overlaps by comparing direct
// and inverse points.
//
/*
*/
//
}
//-----------------------------------------------------------------------------
void TGeoChecker::ShowPoints(Option_t * /*option*/)
{
//
//
/*
*/
//
}
*/
//
}
//-----------------------------------------------------------------------------
void TGeoChecker::Generate(UInt_t /*npoint*/)
{
// Points are randomly generated inside the
// bounding box of a node. For each point the distance to the nearest surface
// and the corresponding point on that surface are computed.
//
/*
*/
//
}
//-----------------------------------------------------------------------------
void TGeoChecker::Raytrace(Double_t * /*startpoint*/, UInt_t /*npoints*/)
{
// A second algoritm is shooting multiple rays from a given point to a geometry
// branch and storing the intersection points with surfaces in same tree.
// Rays can be traced backwords in order to find overlaps by comparing direct
// and inverse points.
//
/*
*/
//
}
//-----------------------------------------------------------------------------
void TGeoChecker::ShowPoints(Option_t * /*option*/)
{
//
//
/*
*/
//
}
ROOT page - Class index - Top of the page
This page has been automatically generated. If you have any comments or suggestions about the page layout send a mail to ROOT support, or contact the developers with any questions or problems regarding ROOT.